


जब आप व्यायाम करते हैं तो आपकी मांसपेशियां मजबूत हो जाती हैं। जब आप कोई पौधा बोएंगे तो उसका तना मुड़ जाएगा जिससे उसकी पत्तियों को अधिक धूप मिलेगी। ये दोनों परिवर्तन अनुकूलन के उदाहरण हैं – जब कोई जैविक सामग्री अपने पर्यावरण को महसूस करती है, तो बेहतर ढंग से जीवित रहने के लिए अपनी आंतरिक संरचना को पुनर्गठित करती है। सभी जीवन को समय के साथ बदलती परिस्थितियों के अनुरूप ढलना होगा। जो आबादी विलुप्त नहीं हो सकती।
हालाँकि, अधिकांश निर्जीव सामग्रियाँ बनने के बाद नई स्थितियों के जवाब में अपनी आंतरिक संरचना को सक्रिय रूप से समायोजित नहीं करती हैं। जब कोई मेटलस्मिथ स्टील की छड़ बनाता है, तो इसकी आंतरिक संरचना ज्यादातर उसी बिंदु से तय होती है, हालांकि यह अभी भी गर्मी, तनाव आदि के कारण बदल सकती है। यदि आप विभिन्न गुणों के साथ एक नई छड़ चाहते हैं, तो आपको इसे नए सिरे से इंजीनियर करने की आवश्यकता है।
हालाँकि, एक नए अध्ययन में प्रकृति भौतिकीयूरोप के शोधकर्ताओं ने इस अंतर को चुनौती दी है। कथित तौर पर टीम ने एक सिंथेटिक सामग्री बनाई है जो बाहरी परिस्थितियों के आधार पर अपने आंतरिक यांत्रिक गुणों को सक्रिय रूप से बदलकर शारीरिक रूप से सीख सकती है।
इकाइयों की श्रृंखला
टीम ने इस काम के लिए मेटामटेरियल्स का इस्तेमाल किया। ये विशेष सामग्रियां हैं जिनके गुण केवल उनकी रासायनिक संरचना से निर्धारित नहीं होते हैं, बल्कि संरचना, या जिस तरह से वे भौतिक रूप से व्यवस्थित होते हैं, उससे भी निर्धारित होते हैं। परिणामस्वरूप, उनमें अक्सर ऐसे गुण होते हैं जो प्राकृतिक सामग्रियों में नहीं होते। पिछले लगभग एक दशक में, वैज्ञानिकों ने मेटामटेरियल्स का उपयोग विपरीत तरीकों से प्रकाश को मोड़ने, इमारतों को भूकंप से बचाने और वस्तुओं को रडार से छिपाने सहित अन्य कार्यों के लिए किया है।
नए अध्ययन में, टीम ने एक रोबोटिक मेटामटेरियल बनाया जिसमें जुड़ी इकाइयों की एक श्रृंखला शामिल थी। प्रत्येक इकाई में एक छोटी मोटर, एक कोण सेंसर और एक माइक्रोकंट्रोलर था। इन घटकों का उपयोग करके, एक इकाई अपनी निकटवर्ती इकाइयों को/से डेटा भेज और प्राप्त कर सकती है और यह बदल सकती है कि वह प्रतिक्रिया में कितना झुकती है। इस तरह, संपूर्ण मेटामटेरियल एक धातु स्प्रिंग जितना कठोर या रबर बैंड जितना लचीला, या बीच में कुछ और हो सकता है, यह इस पर आधारित होगा कि प्रत्येक इकाई ने उससे जुड़ी दो इकाइयों से प्रतिक्रिया पर कैसे प्रतिक्रिया दी। शोधकर्ताओं ने मेटामटेरियल को एक विशेष आकार ‘सिखाने’ के लिए कंट्रास्टिव लर्निंग नामक एक विधि का उपयोग किया।
जबकि कंट्रास्टिव लर्निंग मशीन-लर्निंग में एक एल्गोरिदम के रूप में मौजूद है, शोधकर्ताओं ने इसे केवल हार्डवेयर-आधारित प्रणाली का उपयोग करके यहां लागू किया है।
सीखने के चार चरण
सबसे पहले, शोधकर्ताओं ने मेटामटेरियल श्रृंखला को एक सीधी रेखा में रखा और प्रत्येक इकाई की कठोरता के लिए शुरुआती मान निर्धारित किए। एक इकाई जितनी सख्त होगी, फीडबैक के जवाब में वह उतनी ही कम झुकेगी।
दूसरा, उन्होंने एक इनपुट लागू किया: श्रृंखला में एक इकाई को एक निश्चित कोण से मोड़ना। यह श्रृंखला के शेष भाग को एक विशेष आकार में बदल देगा, जिसे मुक्त अवस्था कहा जाता है। फिर, वे इनपुट को स्थिर रखेंगे और अन्य इकाइयों को मैन्युअल रूप से घुमाएंगे ताकि श्रृंखला एक नया आकार बनाए, जैसे ‘यू’ या ‘एल’। इसे क्लैंप्ड अवस्था कहा जाता था।
अंत में, प्रत्येक इकाई में माइक्रोकंट्रोलर मुक्त अवस्था में अपने कोण की तुलना क्लैंप्ड अवस्था में करेगा, और मोटर का उपयोग करके इसकी कठोरता को समायोजित करने के लिए अंतर का उपयोग करेगा। जब शोधकर्ताओं ने इन चार चरणों को बार-बार दोहराया, तो मेटामटेरियल श्रृंखला कुछ ही चरणों में मुक्त अवस्था से क्लैंप्ड अवस्था में चली गई। इसे विरोधाभासी शिक्षा कहा जाता है क्योंकि प्रत्येक इकाई स्वतंत्र और बंद अवस्थाओं के बीच तुलना करके ‘सीखती’ है ताकि यह पता लगाया जा सके कि उसे क्या करना चाहिए।
इस प्रकार, जैसा कि शोधकर्ताओं ने अपने पेपर में समझाया, “पारंपरिक सामग्रियों के विपरीत जो एक बार और सभी के लिए डिज़ाइन की जाती हैं, हमारे मेटामटेरियल्स में अनुक्रम में नए आकार परिवर्तनों को भूलने और सीखने, पारस्परिकता को तोड़ने वाले कई आकार परिवर्तनों को सीखने और बहु-स्थिर आकार परिवर्तनों को सीखने की क्षमता होती है, जो बदले में उन्हें रिफ्लेक्स ग्रिपिंग क्रियाएं और हरकत करने की अनुमति देती है।
“हमारे निष्कर्ष मेटामटेरियल्स को शारीरिक शिक्षा के लिए एक रोमांचक मंच के रूप में स्थापित करते हैं, जो बदले में अनुकूली सामग्री और रोबोट को डिजाइन करने के लिए भौतिक शिक्षा के उपयोग के रास्ते खोलता है।”
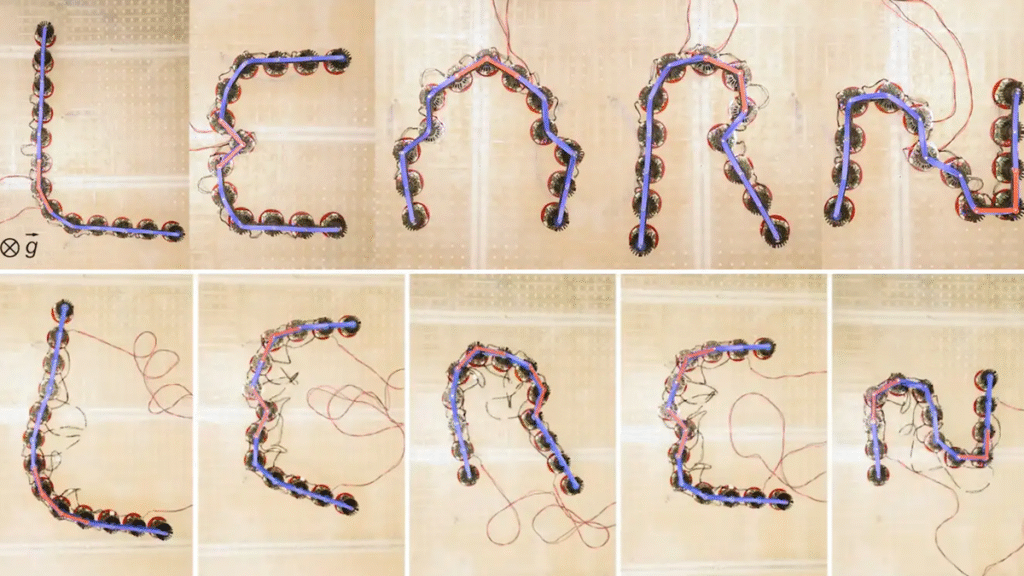
शोधकर्ताओं ने बताया कि एक परीक्षण में, छह इकाइयों की एक श्रृंखला ने अंततः एक सीधी रेखा से एक चरण में यू-आकार बनाना ‘सीखा’। एक अन्य 11-इकाई श्रृंखला ने ‘LEARN’ शब्द के प्रत्येक अक्षर को क्रम से लिखना ‘सीखा’, प्रत्येक चरण में एक आकृति को ‘भूलना’ और अगले को ‘सीखना’। शोधकर्ताओं ने इस क्षमता (कुछ योग्यताओं के साथ) की तुलना सरल जीवों की अनुकूलन क्षमता से की।
एक दूसरे से बात कर रहे हैं
एक सामान्य प्रश्न जो शोधकर्ताओं द्वारा प्रयोगशाला में एक सफल खोज की रिपोर्ट के बाद उठता है, वह यह है कि क्या वे वही चीज़ बड़े पैमाने पर पाएंगे या वास्तविक दुनिया में। अध्ययन के लेखकों ने केवल सिमुलेशन का उपयोग करके इस प्रश्न को संबोधित किया, जहां उन्होंने हजारों इकाइयों के साथ मेटामटेरियल श्रृंखलाओं के कंप्यूटर मॉडल चलाए। हालाँकि, ये मॉडल बहुत जटिल नहीं थे, क्योंकि प्रत्येक इकाई में केवल तीन घटक थे और ‘सीखा’ केवल दो इनपुट के आधार पर था – दोनों तरफ की इकाइयाँ।
हालाँकि, मॉडलों से पता चला कि जैसे-जैसे श्रृंखलाएँ लंबी होती गईं, मेटामटेरियल धीमी गति से ‘सीखा’। ऐसा इसलिए था क्योंकि श्रृंखला से गुजरने वाली विरूपण की मात्रा एक विशेष लंबाई में क्षय हो गई थी। दूसरे शब्दों में कहें तो, एक इकाई से उठने वाला ‘सिग्नल’ दूर की इकाई तक पहुंचते-पहुंचते काफी कमजोर हो जाता है।
शोधकर्ताओं ने एक सरल समाधान पाया: उन्होंने प्रत्येक इकाई को निकटतम इकाई के साथ-साथ अगली-निकटतम इकाई, यानी एक और दो कदम दूर की इकाइयों से ‘बात करने’ की अनुमति दी। इस नियम के साथ, प्रत्येक इकाई के माइक्रोकंट्रोलर ने दो कदम दूर इकाई के कोण के बारे में डेटा प्राप्त किया, और इसका उपयोग इस ‘ज्ञान’ के साथ किया कि कोण X दो कदम दूर था, एक नहीं। इससे इनपुट को श्रृंखला के साथ पहले की तुलना में आगे फैलने की अनुमति मिली। परिणामस्वरूप, शोधकर्ता केवल तीन इनपुट का उपयोग करके एक बिल्ली की रूपरेखा में 48-यूनिट श्रृंखला बनाने में सक्षम थे।

श्रृंखला के काम करने का तरीका स्थानीय निर्णय लेने का एक उदाहरण है। मान लीजिए, यह मानव शरीर के विपरीत है, जहां मस्तिष्क कई इंद्रियों से इनपुट प्राप्त करता है और कई निर्णय लेता है, जिसे तंत्रिका तंत्र अंततः विभिन्न भागों में भेजता है। मशीन-लर्निंग मॉडल बैकप्रॉपैगेशन जैसी तकनीकों का भी उपयोग करते हैं, जहां एक मॉडल के अंत के पास उत्पन्न आउटपुट का उपयोग शुरुआत के करीब कंप्यूटरों को ‘सिखाने’ के लिए किया जाता है।
हालाँकि, मेटामटेरियल श्रृंखला ने ऐसा कोई प्रयास नहीं किया। इसका ‘सीखना’ पहले और बाद की (या अगली-निकटतम) इकाइयों पर आधारित था। यह तकनीकी अनुप्रयोगों में उपयोगी है क्योंकि यह डेटा स्थानांतरित करने के लिए जटिल नेटवर्क की आवश्यकता को दूर करता है।
थोड़ा सा चलना
शोधकर्ताओं ने यह भी पाया कि श्रृंखला ने अलग-अलग प्रतिक्रिया दी, यह इस बात पर निर्भर करता है कि इसे किस तरफ झुकाया गया था। जब उन्होंने बाएं छोर से एक छह-इकाई श्रृंखला को धक्का दिया, तो दाहिना छोर एक तरफ झुक गया। लेकिन जब उन्होंने इसे दाएं छोर से धकेला तो बायां छोर अलग तरीके से मुड़ गया। शोधकर्ताओं ने तर्क दिया कि इस गैर-पारस्परिकता ने मेटामटेरियल को अलग प्रशिक्षण की आवश्यकता के बिना अंतिम आकार प्राप्त करने के विभिन्न तरीकों को ‘सीखने’ की अनुमति दी।
पेपर के साथ एक टिप्पणी में, जर्मनी के म्यूनिख के तकनीकी विश्वविद्यालय के करेन अलीम, जो अध्ययन से जुड़े नहीं थे, ने लिखा कि इस तरह की गैर-पारस्परिकता पारंपरिक भौतिकी की सीमा से परे सामग्री में वैज्ञानिकों की ‘बुद्धिमत्ता’ की समझ का परीक्षण करती है।
उदाहरण के लिए, भौतिकी निर्देश देती है कि जब आप किसी स्प्रिंग को धक्का देंगे तो वह पीछे की ओर धकेलेगा। ऐसा इसलिए है क्योंकि स्प्रिंग अपनी निम्नतम ऊर्जा अवस्था में स्थापित होना चाहता है: जहां यह संपीड़ित नहीं है। इस संदर्भ में, वसंत को अपने ऊर्जा परिदृश्य में घाटी को ढूंढकर ‘सीखने’ के लिए कहा जा सकता है। अर्थात्, यदि आप झरने को इस परिदृश्य में एक अलग बिंदु पर ले जाते हैं, इसे कुछ मात्रा में संपीड़ित या विस्तारित करके, तो यह केवल एक स्थान के लिए एक रेखा बनाकर प्रतिक्रिया करेगा: घाटी।
हालाँकि, डॉ. लिम के अनुसार, श्रृंखला मेटामटेरियल गैर-पारस्परिक है, इसलिए इसमें कोई सरल ऊर्जा परिदृश्य नहीं है। गैर-पारस्परिक प्रणालियों में, बिंदु A से बिंदु B तक जाने के लिए आवश्यक ऊर्जा उस पथ पर निर्भर करती है जो वस्तु अपनाती है – क्योंकि एक से अधिक विकल्प होते हैं। इन मामलों में, यह सवाल बन जाता है कि प्रत्येक पथ पर कितना शारीरिक प्रयास लगता है।
इसलिए जहां स्प्रिंग ऊर्जा को कम करके ‘सीखता’ है, वहीं मेटामटेरियल श्रृंखला काम को कम करके ‘सीखती’ है – इस मामले में मोटरों द्वारा किया गया कार्य। परिणामस्वरूप, श्रृंखला अंतिम आकार के लिए अलग-अलग रास्तों को ‘सीखने’ में सक्षम थी जिस तरह से एक स्प्रिंग कभी नहीं सीख सकता।
“कृत्रिम बुद्धिमत्ता प्रणालियों और मस्तिष्क में सीखने की जटिलता को भौतिक अवधारणाओं में तोड़ना एक दुर्गम कार्य प्रतीत होता है। प्रोग्रामयोग्य मेटामटेरियल तार द्वारा प्रस्तुत किया गया है [the team] जटिलता में एक शानदार कमी है जो आवश्यक भौतिकी अवधारणाओं को सुलझाने की कुंजी है जो सीखने में सक्षम बनाती है और सीखने योग्य अवस्थाओं की जगह को बाधित करती है, ”डॉ. लिम ने लिखा।
एक स्विच की तरह
शोधकर्ताओं को अप्रत्याशित रूप से द्वि-स्थिर इकाइयाँ भी मिलीं – जिसका अर्थ है कि वे स्विच की तरह कार्य कर सकती हैं। उदाहरण के लिए, जब कोई चलती हुई वस्तु छह-इकाई श्रृंखला के संपर्क में आती है, तो श्रृंखला वस्तु के चारों ओर कुंडलित हो जाती है और उसे पकड़ लेती है। वस्तु को मुक्त करने के लिए, शोधकर्ताओं को केवल एक विशेष इकाई को धक्का देना पड़ा, जिसने शेष श्रृंखला को खोल दिया। (यह इकाई द्विस्तरीय थी।)
यही कारण है कि डॉ. लिम ने लिखा है कि मेटामटेरियल श्रृंखला को एक गतिशील प्रणाली के रूप में देखा जाना चाहिए, यानी अनुकूलन करने में सक्षम कुछ। उनके अनुसार, श्रृंखला किसी वस्तु को पकड़ने जैसी जीवन-जैसी क्रियाएं करने में सक्षम थी, क्योंकि यह विशिष्ट पथों के साथ काम को कम करके विभिन्न स्थिर स्थितियों के माध्यम से ‘नेविगेट’ कर सकती थी।
दरअसल, जबकि टीम के प्रयोगों में श्रृंखलाओं ने दर्शाया कि केवल कुछ नियंत्रणीय मापदंडों के साथ एक मेटामटेरियल श्रृंखला क्या करने में सक्षम थी, वे वास्तविक दुनिया में उपयोग के लिए भी तैयार नहीं हैं। टीम को काम करने के लिए एक एयर टेबल और अव्यवहारिक रूप से बड़े घटकों की आवश्यकता थी। लेकिन अगर इन आवश्यकताओं को आसान बना दिया जाता है, तो ऐसी मेटामटेरियल श्रृंखलाओं का उपयोग भविष्य में उन्नत कृत्रिम अंगों और नरम रोबोटों के रूप में किया जा सकता है, जिन्हें बाधाओं पर तेजी से प्रतिक्रिया करने की आवश्यकता होती है।
कुल मिलाकर, उन्होंने निष्कर्ष निकाला, उनका “कार्य अनुकूली मेटामटेरियल्स के साथ-साथ नरम और वितरित रोबोटिक्स के डिजाइन का मार्ग प्रशस्त करता है”।
mukunth.v@thehindu.co.in